Legged robots have been used for workflow automation, deployment in hazardous environments, and variety of other tasks. The task requirements determine which type of legged robot to use, limiting to one form of locomotion. For example, when traversing uneven terrains, one can benefit from the stability of quadruped robots. When it comes to manipulating objects, reaching high objects, or navigating in narrow spaces, the dexterity of bipedal robots might be beneficial. What if the robot has all these together?
The application of legged robots requires planning through contact. When contact is involved, the planning problem becomes significantly harder. Not only do the dynamic systems that govern robot motion change but, with manipulation, so do the environment and robot states. The planning problem becomes a hybrid one, where continuous motion plans have to be made alongside the discrete decisions of when and where robots should make or break contact with the environment. In this work, we are concerned with the “loco-manipulation” planning problem. That is, performing manipulation while locomoting a legged robot.
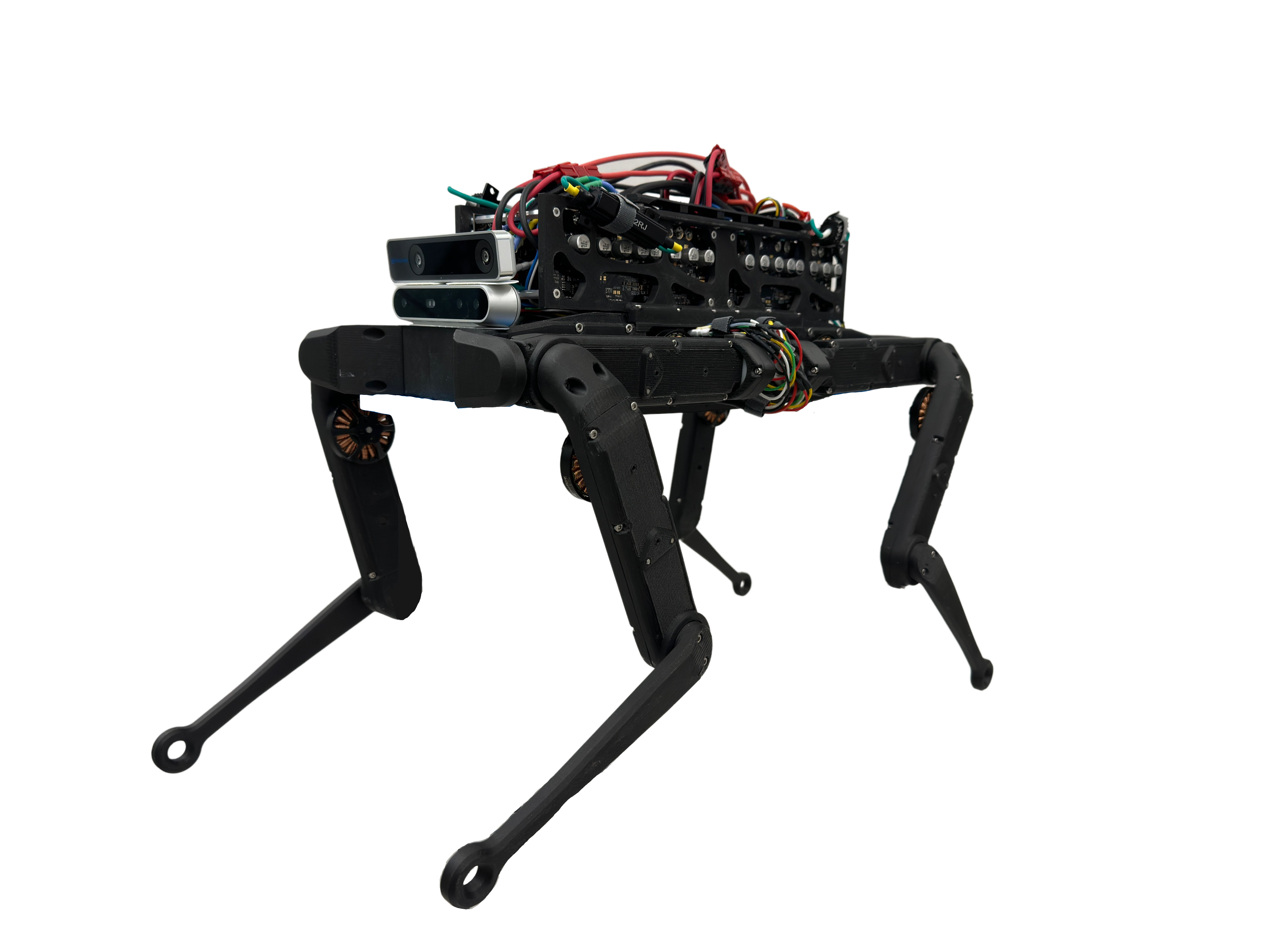
In academic year 2022-2023, the focus of the project was on the development of a quadruped robot named Solo 12, which will be integrated to switch seamlessly between quadrupedal and bipedal modes of lo- comotion. This adaptability makes it ideal for navigating unstructured environments. The project delved into the integration of dynamic control system, technical aspects of the robot’s development, including hardware architecture, electronics installation, and software stack with an emphasis on locomotion control. Additionally, the project explored the use of computer vision technology for person tracking.